Maglev¶
本篇針對 2016 年的論文 Maglev: A Fast and Reliable Software Network Load Balancer 進行說明。
概述¶
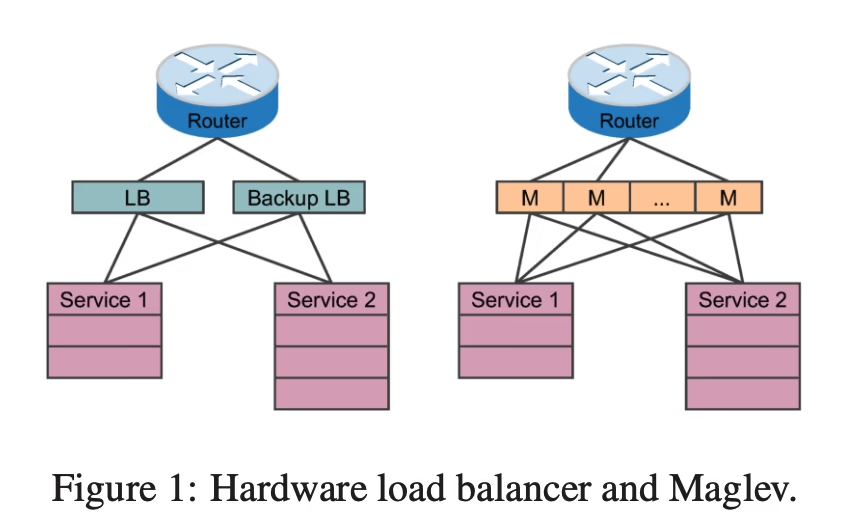
Maglev 是個軟體 L4 負載均衡器(Load Balancer, LB),他被建構在一般的 Linux 機器上,所以可以很大地節省維護硬體設備的成本(人力、專業等等)。除此之外,他不像硬體設備那樣通常都是 active-standby,而是每台設備都能有效地處理封包,輕易達到水平擴展。在使用 8 core、128 GiB 和 10 Gbps NIC (Network Interface Card) 的當代(2016)硬體下,每台設備達到約 12 Mpps 的處理能力。對應到 Google 當時每個叢集會需要處理 10Gbps 的流量,這相當於 813Kpps 的 1500-byte IP 封包、或者 9.06 Mpps 的 100-byte IP 封包。
為什麼硬體設備通常都是 active-standby
說到 L4 負載均衡器,勢必會提供 TCP 的負載,然而 TCP 為了做到連線的效果,需要紀錄獨自處理所有的封包(為了做計數)。
如果有兩台 LB,封包分散開來就會出錯。

網路在傳輸時,實際的邏輯會被封裝好幾層,這就是 OSI 分層的概念。當 Maglev 前面的 路由器(router)收到封包的時候,會透過 ECMP 決定該分派封包給哪個 Maglev。此時,Maglev 根據 L3 和 L4 的資訊組成一個組合,稱為 5-tuple1,也就是:來源 IP、目的 IP、來源阜、目的阜、協定類別。透過這個組合,計算 consistent hashing 來指定最終服務叢集裡的特定節點。
換句話說,Maglev 沒有真正處理 L4 的連線問題,而是透過確保特定流(flow)的封包流入特定的節點。
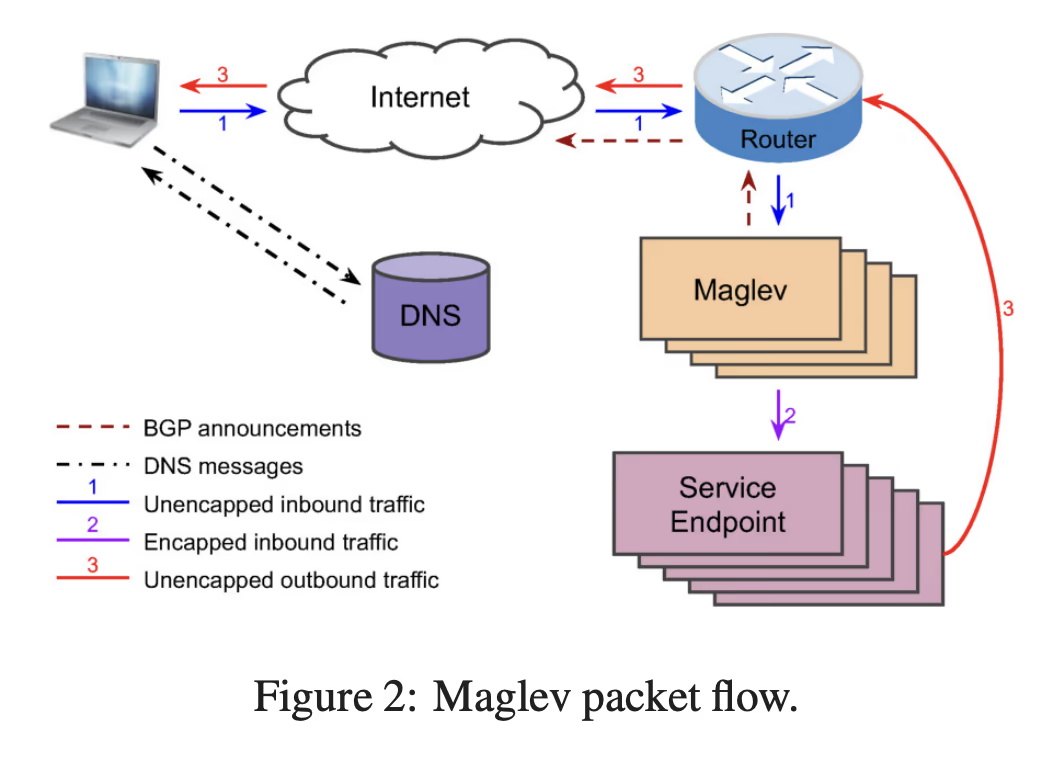
也由圖可知,封包是走 DSR 模式。
這些就是 Maglev 的抽象結構,說起來簡單,但是論文內介紹的一些實作,做起來卻並不簡單。
背景知識¶
在開始講細節前,先簡單補足一下背景知識。
ECMP¶
Equal-cost multi-path routing (ECMP) 是一種路由演算法,我們來透過實際案例了解他吧!
假設有一個路由器 (R) 連接到三台伺服器 (S1, S2, S3) 和一台客戶端機器 (C)。從 R 到達伺服器有兩個等價成本的路徑,路徑 1 (R -> 介面 1) 和路徑 2 (R -> 介面 2)。ECMP 的封包流動如下:
- 客戶端啟動流量:客戶端 C 向伺服器 S1 發送封包。
- 封包到達路由器:封包到達路由器 R。
- ECMP 選擇:由於有兩個等價成本的路徑 (路徑 1 和路徑 2) 可達 S1,因此 ECMP 將發揮作用。路由器使用雜湊算法(基於源和目的地 IP 地址等因素)來確定此特定封包的路徑。
- 假設雜湊函數為此封包選擇了路徑 1 (介面 1)。
- 封包轉發:路由器 R 將封包轉發到介面 1,朝向伺服器 S1。
現在,想像客戶端 C 向伺服器 S1 發送另一個封包。ECMP 將再次根據雜湊算法計算路徑。有兩種可能性:
- 如果雜湊函數再次選擇路徑 1,此封包將遵循與前一個封包相同的路徑。
- 如果雜湊函數這次選擇了路徑 2 (介面 2),則封包將採取不同的路由到達 S1,從而實現負載平衡。
ECMP 的優點:
- 增加頻寬:通過利用多條路徑,ECMP 可以分佈流量並潛在提高整體網路吞吐量。
- 容錯性:如果一條路徑不可用,流量可以自動重新路由到剩餘路徑,從而提供冗餘。
需要考慮的事項:
- 連線的處理:如果封包走到另外一台設備,原本的連線根據實作可能會中斷
然而 Maglev 透過一些手段,來避免連線的中斷。
BGP¶
Border Gateway Protocol (BGP),號稱最複雜和重要的路由協定之一,主要目的有幾個:
- 路由佈達,對其他 ISP 宣告自己內部擁有的 IP 前綴;
- 路由調整,每次路由設定的調整(例如 IP 下線),都需要對外做宣告;
- 路徑選擇,透過路由的各種參數(例如 hop 數量),選擇走到特定 IP 的最佳路徑;
- 傳遞流量,路由器根據 BGP 的資訊,進行封包傳導。
Linux Bypass¶
Linux 在處理封包的時候是複雜的,這是因為他需要處理很多 L3/L4 的實作邏輯。而在 Maglev 實作中,則是使用 Linux kernel bypass 這個模組,透過客製化達到高效性。
實作細節¶
服務發現¶

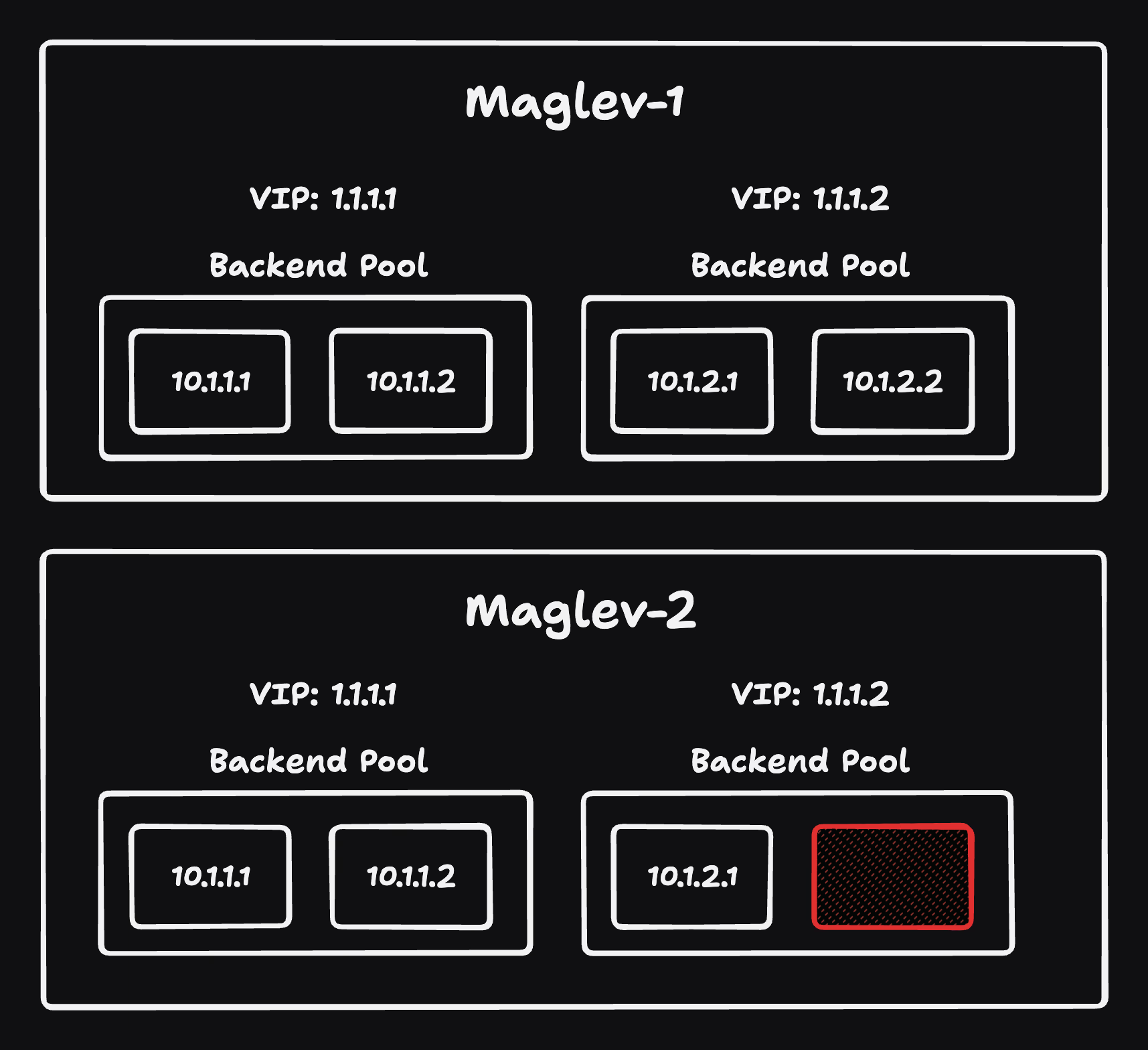
注入設定之後,透過 Config Manager 分發所有上游的設定,包含上游服務各個節點的實體 IP 和代表服務的 VIP。同時會有個 Health Checker 檢查上游,並決定哪些上游可以接收封包。
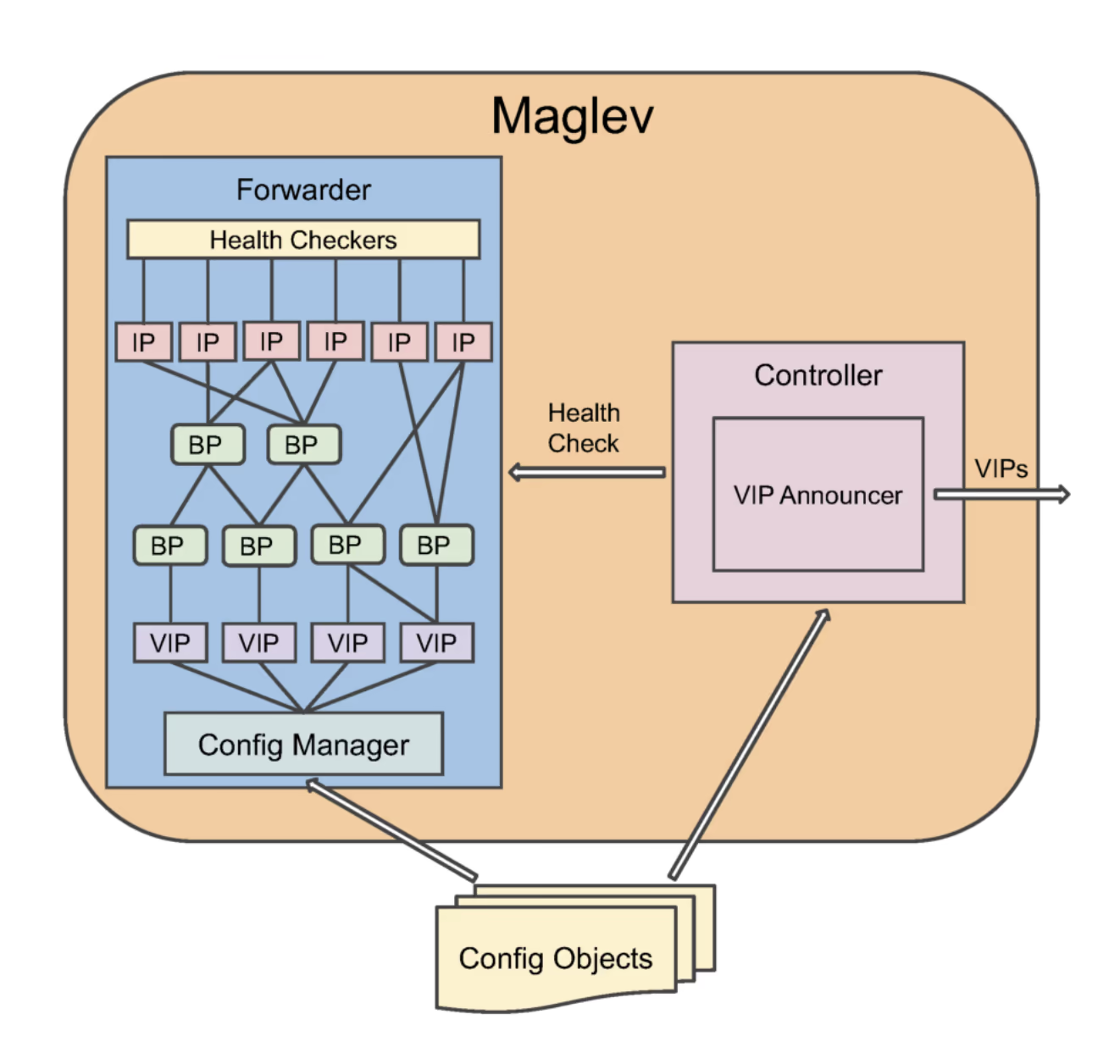
Maglev 也會透過注入的設定,把相關的 VIP 藉由 BGP(圖上的 VIP Announcer)做路由佈達。
由於分散式的架構,兩台 Maglev 有可能會有短暫的時間,同時擁有不同的設定,這時透過 ECMP 和 consistent hashing 機制,依照相同的 5-tuple 仍然可以選擇到相同的上游。
However, consistent hashing will make connection flaps between Maglevs with similar backend pools mostly succeed even during these very short windows.
Forwarder¶
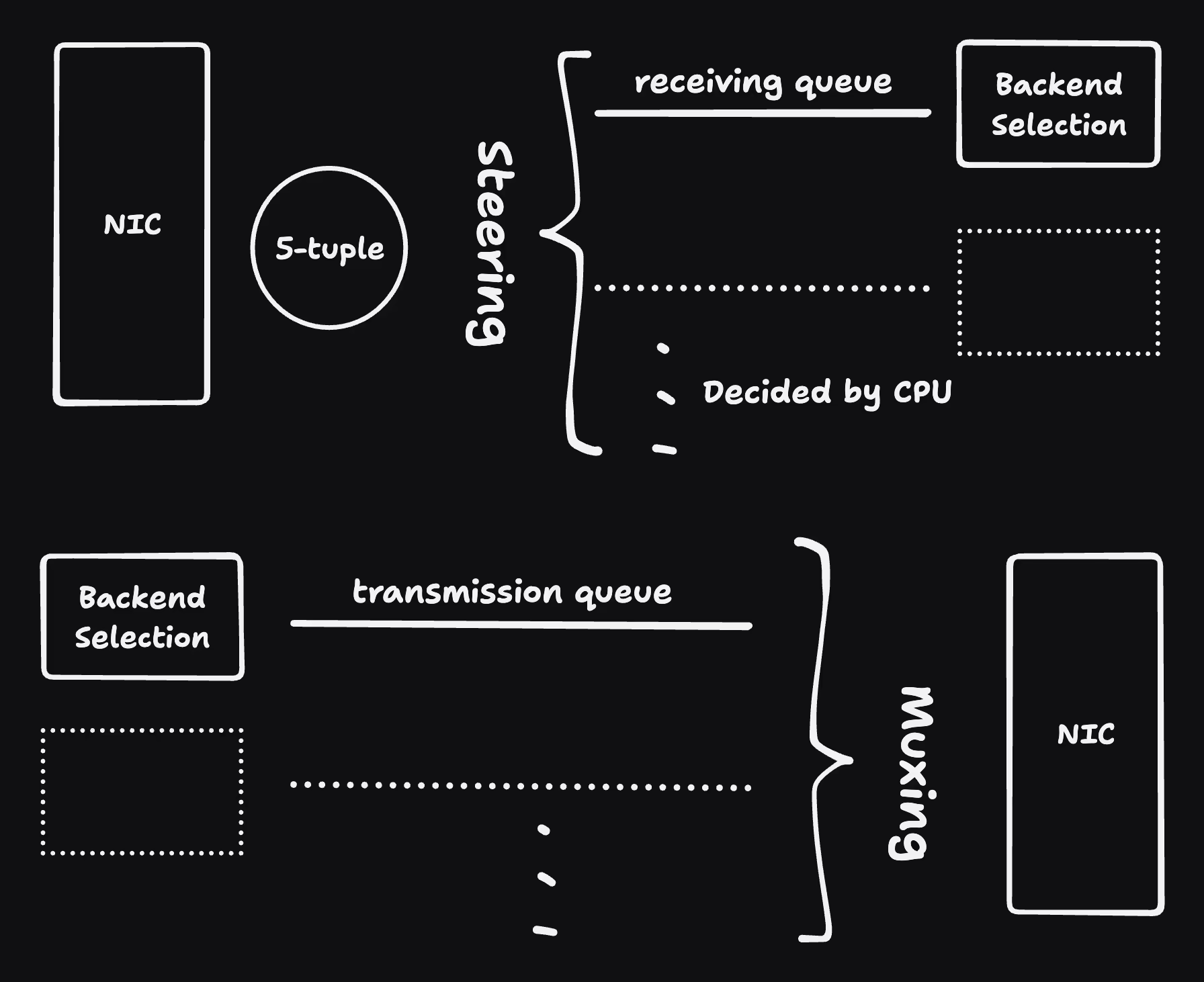
Forwarder 透過 NIC 收到封包之後,Maglev 會選擇出特定的上游,然後把相關封包進行包裝(encapsulation)後,傳遞給該上游。
一開始讓每個封包透過 5-tuple 選擇 receiving queues 有兩個好處:
- 同個上下游的封包都在同個 queue 中處理,比較不會造成處理速度不一致,並進而導致失序。
- 同個上下游的封包在進入相同的 queue 之後,就只會選擇一次 backend,不用每次都重選一次。
但是當特定 queue 塞滿時,就會開始使用 round-robin 的選擇演算法,避免封包一直排不到隊。
以下是 backend selection 的邏輯:
flowchart TD
packet[Poll from receiving queue] --> vip{Lookup VIP}
vip --hit-->tuple[Calc 5-tuple]
vip --miss--> drop[Drop]
tuple --> backend{Lookup conn table}
backend --hit--> enc[Encapsulate]
backend --miss--> hash{Consistent Hashing}
hash --select--> insert[Insert to table]
insert --> enc
hash --empty-->drop
enc --> trans[Transmission Queue]之所以不使用 steering 的 5 tuple 是為了避免跨 thread 之間的衝突,每個 thread 維護自己的 connection table 也是同樣的原因。
另外當上游沒有任何可用的節點時,consistent hashing 就會得到 empty 然後 drop 掉相關封包。
Packet Pool¶
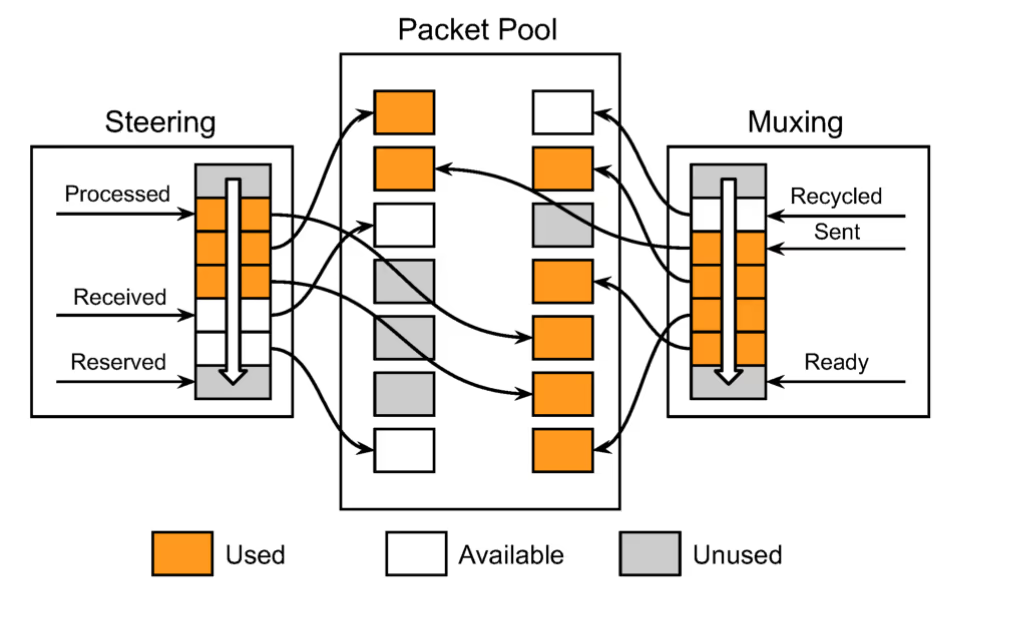
由於 Maglev 的其中一個特色是可以在 Linux 機器中進行部署,所以需要透過 bypass Linux kernel 來避免中間的無謂消耗。為了讓封包在 steering 和 muxing 等模組之間傳遞時,不要用複製,他們都是使用指標進行處理,同時,為了限制服務的記憶體使用,就需要建立一個 packet pool 來限制服務的資源使用。
在 Maglev 啟動時,會去要一定大小的 packet pool 去儲存封包,除此之外,steering 和 muxing 模組也會分別要到一定大小的 ring queue 來儲存封包的指標。而這兩個模組,各自又在 ring queue 上放了三種不同意義的探針:
- received:steering 收到 NIC 的封包後,會把該封包的指標放在這;
- processed:steering 會把該指標上的封包分配給對應的 receiving queue;
- reserved:steering 會把 packet pool 裡的空閒位置,進行預約使用;
- sent:muxing 會把在這的封包送出封包給 NIC;
- ready:muxing 會把 transmission queue 的封包拿出來放這;
- recycled:因為任務完成,muxing 會把這裡在 packet pool 佔用的位置給釋放。
這裡每個探針在處理相應的任務後,就會加 1,換句話說,這些探針會互相追趕他們下個任務的探針。
優化調整
為了追求效率,每個探針都是批次處理任務,所以探針可能會一次加超過 1。
為了達到這個批次處理,兩個模組會在等到封包達到一定大小後,或者等到超過 \(50\mu s\) 後,才去處理,這就會損失一定的潛時。
前面提到的 forwarder 的每個 thread 在處理一個封包上,會花到約 350ns,在這樣的背景下,低流量時期可能會讓封包處理速度變慢,可能的做法就是動態調整這個批次大小。
這裡也一起計算一下 Maglev 理論上的極限值,假設 packet pool 存放最多 3000 個封包(假設一個封包大小為 1500-byte,就會需要 4.5 MB 的記憶體),然後假設整個 forwarder 可以處理 10 Mpps 的量,也就是說他需要使用 \(3000\text{p} / 10^7\text{pps} = 0.0003\text{s}\) 秒來完全處理這些封包。這代表 Maglev 會造成特定封包最高 \(300\mu s\) 的延遲。
Consistent Hashing¶
前面有提到 ECMP 會透過雜湊來選擇上游,理論上當 Maglev 叢集數量沒變,相同請求都會被選擇到同一個 Maglev 上。但這個假設會隨著維運日常而被打破,例如新增、減少機器。也因此,在這邊的 consistent hashing 就很重要,因為不同的 Maglev 會根據相同的 hash 結果,而去選擇相同的上游。
邊際狀況
當在 Maglev 節點新增減少時(ECMP 重算時),如果同時去更新 Maglev 的設定檔,就很可能會遇到前面提到的邊際狀況,導致連線錯位(connection flaps)。
早在 1990s Rendezvous 就提出第一個 consistent hashing 的機制,想像一下如果用 mod 來做上游的挑選,假設總共有 5 個上游節點,根據 5-tuple 去做一個 hash 然後用 mod 5 的結果,來平均分配給這 5 個節點。但是如果服務從 5 個節點變成 6 個,就會讓幾乎所有連線都被重新分配,例如 10 mod 5 從 0 變成 4。consistent hashing 就是在解決這個問題。
這裡提一下早前的演算法套用在 Maglev 上會有的一些狀況:
- 當同個服務上游節點數量達到數百時,需要很大的表來達到足夠均衡的負載;
- 在 Maglev 中是可以稍微接受表重建,因為 ECMP 在 Maglev 數量不變情況下,可以確保相同 5-tuple 送到同個 Maglev,在 Forwarder 的機制下,仍會走到同個上游。
換句話說,在犧牲第 2 點的情況下,我們可以嘗試改善第 1 點。
什麼是「表」
這裡的表在展示演算法細節時就會看到,概念就是 consistent hashing 會建立一個表,以達到穩定散列的目的。
每次表重建,就有可能導致相同的 5-tuple 對應到不同上游。
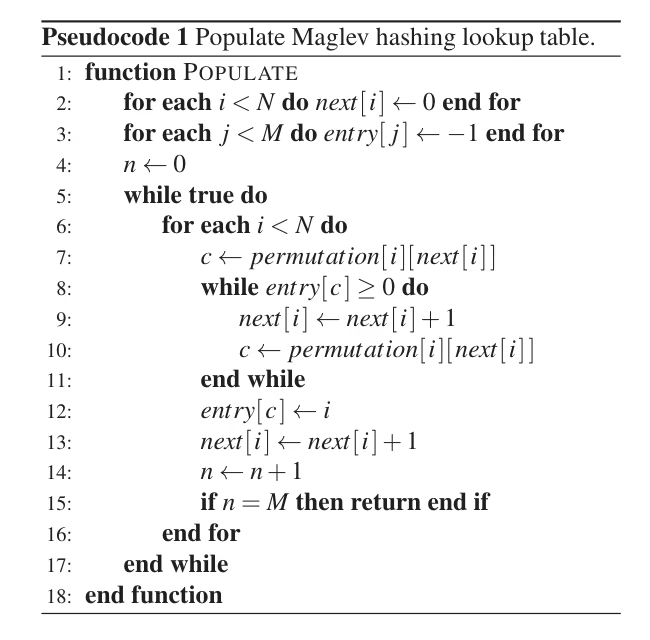
Maglev 的 Consistent Hashing¶
假設我們有個表大小為 \(M\)、上游數量為 \(N\),並選定兩個 hash 函式,h1、h2,然後依此找出每個上游的 offset 和 skip:
最後就可以建立出對照表:
但這裡要記得把 M 設為質數,否則在用 skip 遍歷 permutation 就會跳不出循環。
最後根據上述的演算法得出一個長度為 M 的散列表 entry。
範例¶
假設有 3 個上游,表大小為 7,且 3 個上遊的 offset 和 skip 分別是:(3, 4)、(0, 2) 和 (3, 1),得出 permutation 表如下:
j |
i=0 |
i=1 |
i=2 |
|---|---|---|---|
| 0 | 3 | 0 | 3 |
| 1 | 0 | 2 | 4 |
| 2 | 4 | 4 | 5 |
| 3 | 1 | 6 | 6 |
| 4 | 5 | 1 | 0 |
| 5 | 2 | 3 | 1 |
| 6 | 6 | 5 | 2 |
在前面的演算法中,我們展示在第 5 行的 while loop 一步一步推演下的情況(假設 B0 代表 i=0 的上游):
| Step | B0 | B1 | B2 |
|---|---|---|---|
| 1 | 3 | 0 | 3, 4 |
| 2 | 0, 4, 1 | 2 | 5 |
| 3 | 5, 2, 6 | - | - |
在上述推演下,可以得出 entry:
| j | Backend |
|---|---|
| 0 | B1 |
| 1 | B0 |
| 2 | B1 |
| 3 | B0 |
| 4 | B2 |
| 5 | B2 |
| 6 | B0 |
當 B1 這個上游下線之後,重新推演:
| Step | B0 | B2 |
|---|---|---|
| 1 | 3 | 3, 4 |
| 2 | 0 | 5 |
| 3 | 4, 1 | 6 |
| 4 | 5, 2 | - |
得出的新 entry,並進行比較:
| j | Old | New |
|---|---|---|
| 0 | B1 | B0 |
| 1 | B0 | B0 |
| 2 | B1 | B0 |
| 3 | B0 | B0 |
| 4 | B2 | B2 |
| 5 | B2 | B2 |
| 6 | B0 | B2 |
可以看到大部分的 hash 仍在原本位置,但是部分仍會有變更,例如 j=6。從以上範例可以知道這是一組上游,如果你有很多個服務,每個服務都有自己的一群上游,這時就會需要建置相應數量的表,所以表的大小,對於服務的資源用量就是一項重要議題。
Monitoring and Debugging¶
除了透過白箱(以 HTTP 方式暴露指標)和黑箱(探針)去定期監控外,Maglev 也有一些除錯手段。
由於從 router 走到 Maglev 再走到上游節點的路徑很多種,有時為了除錯,會需要一個方法知道 Maglev 到底把這個封包送給誰。開發團隊讓 Maglev 可以辨識特定 L3 和 L4 的表頭,當收到這個表頭,就會把這次的路由歷程等等用來除錯的資訊發送到特定的 IP 中。
開發者顯然很愛這個除錯工具:
This tool is extremely helpful in debugging production issues, especially when there is more than one Maglev machine on the path, as happens in the case of fragment redirection.
測試¶
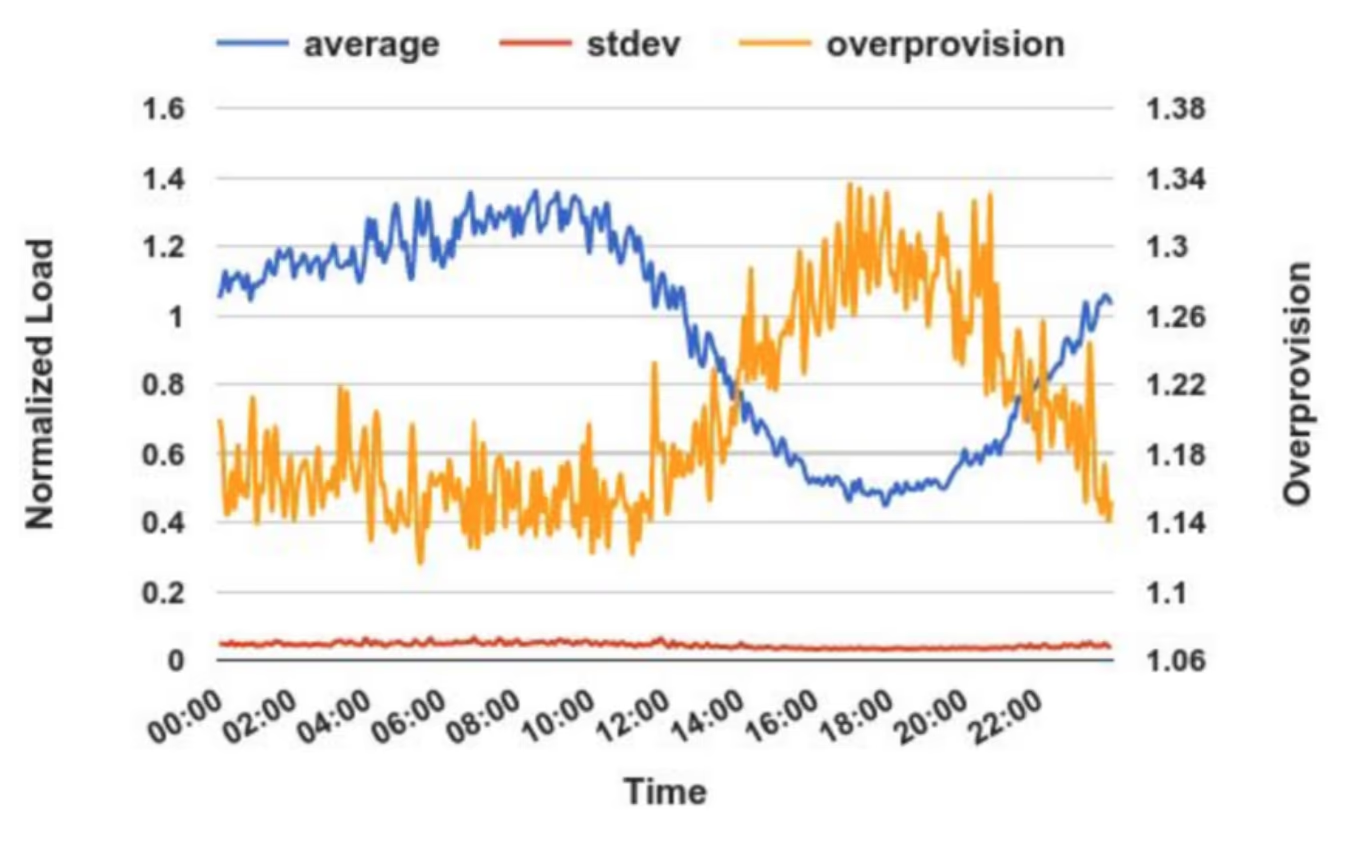
收集歐洲叢集中,458 個上游(包括 Google Search)的 connections per second (cps) 後,他們計算出其整體的 cps 平均值和標準差,標準差都落在 6%~7%。從平均值(藍線)中也可以看出高低封和作息的關係(時間軸並非當地時間)。
黃色線則代表是否過度建置機器,在流量高峰時大約落在 9 成的負載能力,也就是説,假設服務可以最高承載 10 rps 的流量,實際流量則落在 9 rps。離峰時因為流量低本身就很較難抓資源,所以就容易有過度建置的問題,但是也落在 7.5 成左右。
這項指標代表著 Maglev 是否正確的均衡負載,因為越不均衡的越容易造成過度建置。
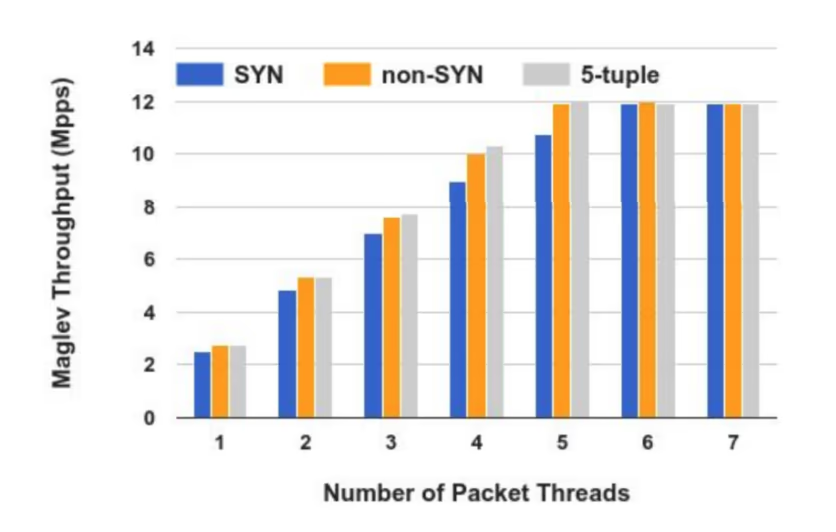
SYN 的封包代表著第一次通過 Maglev,所以會需要計算 consistent hashing 來尋找上游;non-SYN 則是代表連線建立後的封包,因為不用計算 consistent hashing 所以通量較高;最後則是極端的 5-tuple,完全相同的來源和目的,用來測試理論上的最高通量。
當 thread 數拉高到 6 和 7 的時候,就可以看到瓶頸不是算力,而是在於 NIC。當 NIC 為 40 Gbps 時,就可以順利上去,但是再上去的瓶頸又變成了 steering 模組,所以這也是未來可以優化的方向。
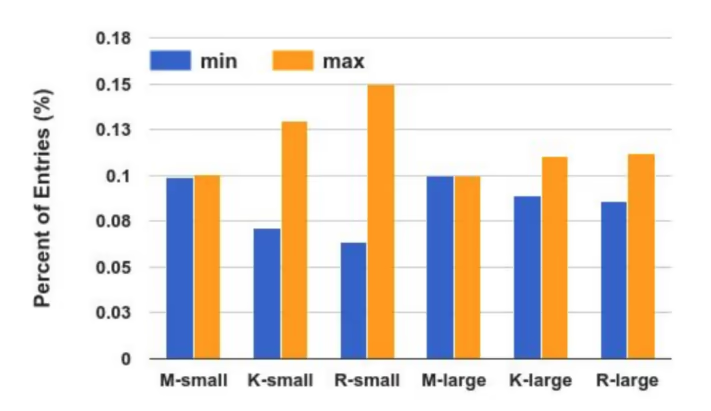
透過 Maglev 的 consistent hashing 演算法,只需要 65537 的表 2,不需要 65537 這麼大的表,就可以讓負載達到足夠均衡。
上圖的實驗是設定 1000 個上游,並對應兩種不同大小的表和三個不同的演算法,縱軸代表每個上游在這張表出現的比例,換句話說,每個上游分配到 0.001 的表就是完美的均衡負載。可以看到除了 Maglev 的演算法之外,剩下兩個都容易會有不均衡負載的狀況。
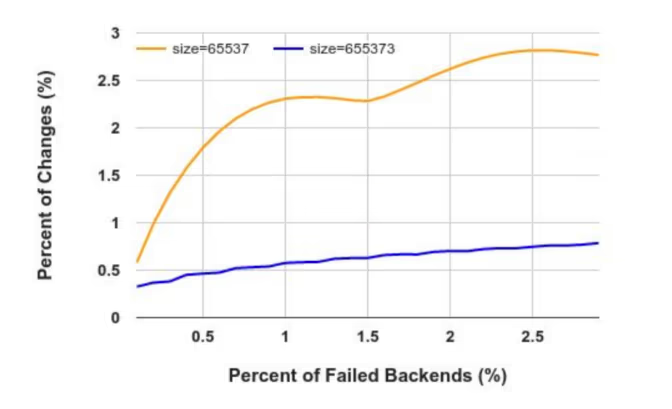
由於 Karger 演算法和 Rendezvous 演算法都不會因為上游變動,而改變其對應位置,所以上圖只有展示 Maglev 對於上游變動的負荷能力。隨著一定比例的上游失能(橫軸),可以看到這張表的錯位比例會上升,而表越大,越能容錯。
即使如此,Maglev 預設的表大小仍然是 65537,這是因為 65537 大小的表重建需要約 1.8ms,而 655373 的表則需要 22.9ms,這是因為一次性大量上游失能的情況不多,犧牲的數十毫秒就顯得不夠划算。
延伸¶
以下是一些實務上會遇到的問題和相關擴展的應用。
VIP Matching¶
Google 有很多叢集,並且會替各個叢集分類(classes),越大的叢集其內部擁有的 IP 就越多,換句話說,它的 IP 前綴會更短,例如 121.113.17.0/20 就比 74.125.137.0/24 還要大。
當上游發生災難的時候,Maglev 會需要把流量轉移到不同的叢集上游中,這時,它們就需要個方法知道各個叢集的上游 VIP。比起透過設定等方式讓各個 Maglev 認出對方來,開發團隊提出另一個方式來解決。
我們讓不同叢集,但是相同上游的 BP 都會擁有相同「後綴」的 VIP。這時,如果我們限制 Maglev 只能把流量轉導到相同等級的叢集,就可以不需要知道對方上游 VIP 的狀況下,單純把封包前綴改成對應的叢集,就可以順利轉導。
以上圖為例,173.194.71.1 的 Service 1 被轉導為 173.194.72.1 的相同服務。
Fragment Handling¶
在 IP 中,有一個技術稱為 IP 分片 (IP fragmentation),它的目的是最大化封包效率,例如大資料的傳輸。該協定只會讓第一個封包擁有 L4 的標頭,換句話說,前面提到的 5-tuple 因為沒有 port 的資訊,所以計算出的 5-tuple 會失準,導致送到不同的上游。
Maglev 會先透過 3-tuple(來源 IP、目的 IP、協定類別),決定該封包要讓 Maglev 叢集中的哪個 Maglev(透過設定讓它們認識對方)處理。當確保同個流的封包都進到同個 Maglev 後,就可以在其內部決定上游要走哪一個節點,其演算法如下:
- 第一個封包用和 forwarder 相同的演算法決定上游,接著紀錄該 3-tuple 和上游對照的表;
- 後續封包計算 3-tuple 後,根據該表的結果,決定送給哪個上游。
如果後續封包比第一個封包早到,就會快取等到第一個封包抵達,或者過期。由於限制可以使用 fragmentation 的服務,所以這個表不需要多大的資源就能處理。
Sharding¶
文中有提到 Maglev 理論上是可以做 sharding 的,但是並沒有太多細節,我認為這個題目滿適合當作回家作業的,可以拿來自己想想該怎麼實作比較好,就不在這邊闡述了!
總結¶
和硬體負載均衡器相,Maglev 可以做到水平擴展,通過一些巧妙的設計也能有效維持長連線。市面上其實也有一些軟體負載均衡器如 Microsoft Ananta ,但是並沒有針對 kernel 的高效使用和上游節點異動的狀況來優化。其他如 NGINX 的通用型負載均衡器,雖然可以搭配 ECMP 的路由器和 consistent hashing 的外掛,但是為了滿足更多的客製化和便利性,犧牲部分效能。
其他軟體優化細節的參考放在下面,有興趣再看吧!不過看到 Maglev 簡單的設計,讓我想到同事的一句話,就以此句話做為結尾:
分散式的問題是個很好理解的問題,也很直觀,但是為什麼解決這個問題的方式都這麼複雜?
實作細節參考
Smith et al 3 建議減少軟中斷和物件複製來增加應用程式的通量。Mogul et al 4 開發 polling-based 的方式來避免鎖的中斷。Edwards et al 5 提出使用 userspace 的網路來做隔離。Marinos et al 6 顯示使用特定 userspace 網路堆棧和 kernel bypass 可以大幅提高通量。Hanford et al 7 建議把分散的封包放在不同 CPU 處理,提高快取命中率。CuckooSwitch 8 是個高校的軟體 L2 交換器,其中一個特色就是批次和預約式的所取記憶體。RouteBricks 9 解釋如何有效的利用平行運算來處理不同的封包。
... 如同其他技術,當 Maglev 啟動時它會劫持整個 NIC,並使用 TAP 介面來把封包重新傳遞給 NIC。
-
參閱第三段,Forwarder Design and Implementation。 ↩
-
這數字沒有任何意義,只是選了一個夠大的質數做實驗。 ↩
-
J. Smith and C. Traw. Giving applications access to gb/s networking. Network, IEEE, 7(4):44–52, 1993. ↩
-
J. C. Mogul and K. K. Ramakrishnan. Eliminating receive livelock in an interrupt-driven kernel. In Proceedings of USENIX ATC, 1996. ↩
-
A. Edwards and S. Muir. Experiences implementing a high performance tcp in user-space. In Proceedings of SIGCOMM, 1995. ↩
-
I. Marinos, R. N. Watson, and M. Handley. Network stack specialization for performance. In Proceedings of SIGCOMM, 2014. ↩
-
N. Hanford, V. Ahuja, M. Balman, M. K. Farrens, D. Ghosal, E. Pouyoul, and B. Tierney. Characterizing the impact of endsystem affinities on the end-to-end performance of high-speed flows. In Proceedings of NDM, 2013. ↩
-
D. Zhou, B. Fan, H. Lim, M. Kaminsky, and D. G. Andersen. Scalable, high performance ethernet forwarding with cuckooswitch. In Proceedings of CoNEXT, 2013. ↩
-
M. Dobrescu, N. Egi, K. Argyraki, B.-G. Chun, K. Fall, G. Iannaccone, A. Knies, M. Manesh, and S. Ratnasamy. Routebricks: Exploiting parallelism to scale software routers. In Proceedings of SOSP, 2009. ↩